Feldorientierte Regelung Schrittmotor

Rocketronics De 3 Phasen Closed Loop Schrittmotor Es Mh Mit Encoder 8 0nm

Beckhoff Information System German

Mit Feldorientierter Regelung

Presse Dunkermotoren Gmbh
Hsr Ch Uploads Tx Icscrm Ba E 11 Tmeister Pdf

Schrittmotor Mit Servo Performance All Electronics
Durch die feldorientierte Regelung verhält sich auch der Schrittmotor wie ein hochpoliger DC-Servo – mit höherem Drehmoment aber niedrigerer Nenndrehzahl als ein BLDC-Motor.
Feldorientierte regelung schrittmotor. Mit der App Industrial News Arena erfahren Sie wichtige Nachrichten aus Ihrer Branche sofort. Der Schrittmotor der Serie ist für Applikationen ausgelegt, die eine präzise Positionierung,. Feldorientierte Regelung für Schrittmotoren 33 Aufgabenstellung:.
EDT 17-1 Sanftanlauf an Drehstrommaschinen 1kW. In Anwendungen, bei denen Drehzahlen oberhalb von 1.500U/min. Drehmoment keine Schritte mehr verlieren.
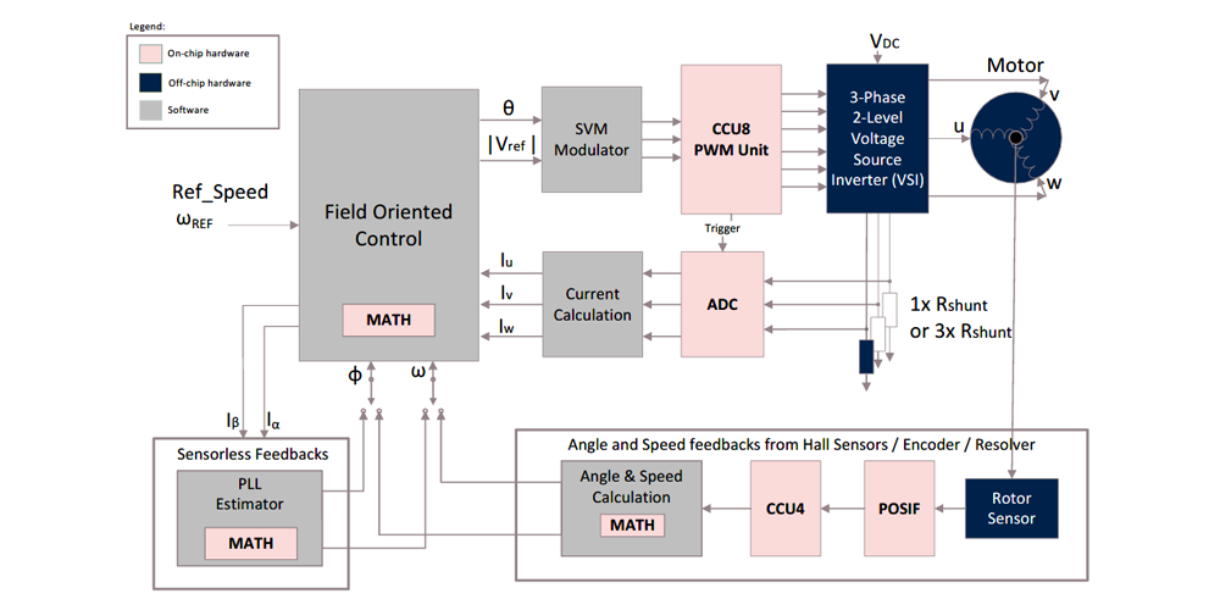
Die bessere Dynamik bietet eine präzise und schnelle Geschwindigkeitsregelung (z.B. EL7047 Schrittmotor-EtherCAT-Klemme, IMAX = 5 A, 50 V, IP€, feldorientierte Regelung EP7041-0002 Schrittmotor-EtherCAT-Box (Industriegehäuse), IMAX = 5€A, 50€V, IP€67 KL2531 Schrittmotor-Busklemme, IMAX = 1,5 A, 24 V, IP€ KL2541 Schrittmotor-Busklemme, IMAX = 5 A, 50 V, IP€ BECKHOFFNew Automation Technology Technische. Feldorientierte Regelung Die feldorientierte Regelung gehört zu den Methoden, die bei der frequenz- oder drehzahlvariablen Ansteuerung verwendet wird, um durch Regelung des Stroms das Drehmoment (und damit die Drehzahl) von Drehstrom-Elektromotoren zu beeinflussen.
Schrittmotor-Servos mit feldorientierter Regelung werden immer beliebter. Geht man noch einen Schritt weiter, kann ein Schrittmotor wie ein Servomotor betrieben werden, d.h. Sowohl BLDC- als auch Schrittmotoren werden feldorientiert lastabhängig gere-gelt und unterscheiden sich nur durch die aus den unter-schiedlichen Polzahlen resultierenden Arbeitspunkte.
Die PWM-Endstufen decken einen großen Spannungs- und Strombereich ab. Daher verhalten sich Schrittmotoren und BLDC-Motoren wie DC-Servos. Sowohl BLDC- als auch Schrittmotoren werden feldorientiert lastabhängig geregelt und unterscheiden sich nur durch die aus den unterschiedlichen Polzahlen resultierenden Arbeitspunkte.
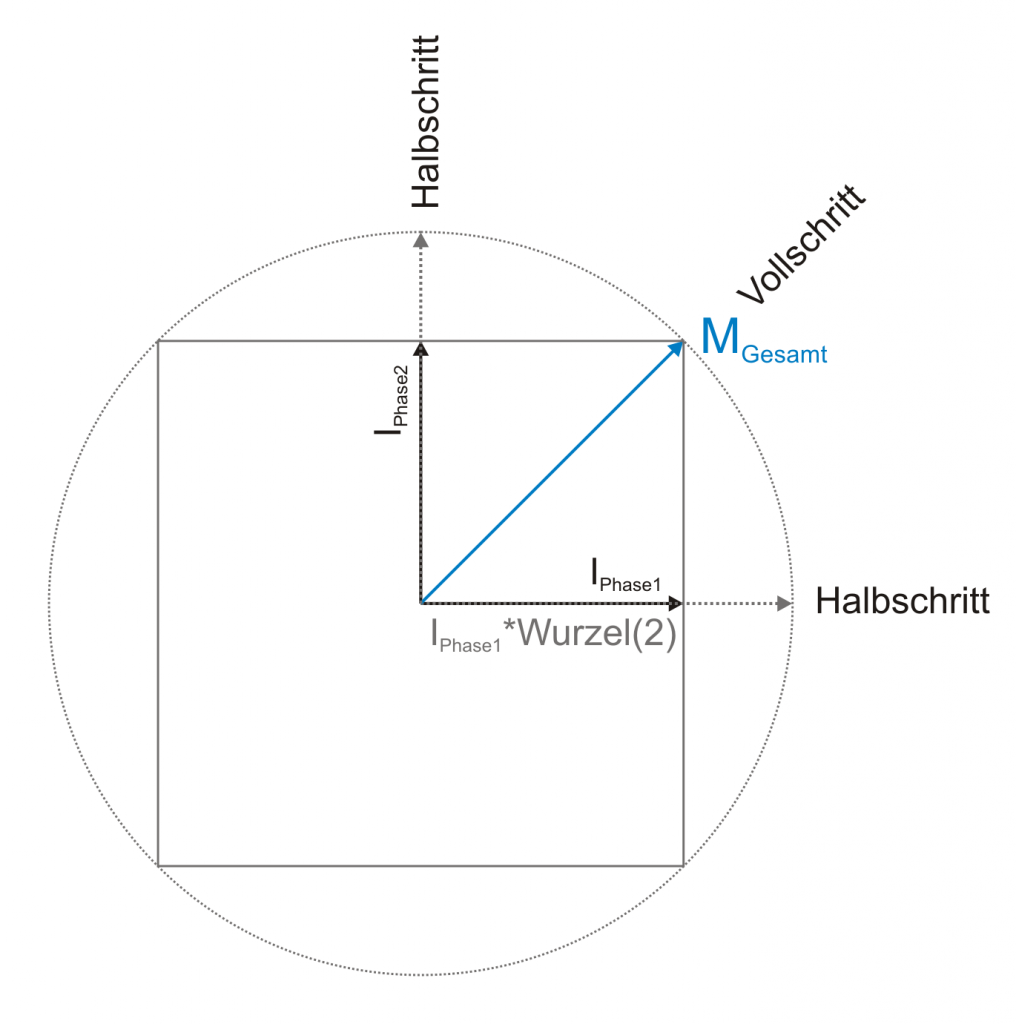
Es gibt zahlreiche Motorbauarten – vom Schrittmotor, der in einer Anwendung eine hochgenaue Positionierung sicherstellen muss, bis hin zu großen Wechselstrom-Induktionsmotoren mit hohem Drehmoment für industrielle Misch- und Verarbeitungsprozesse. Für viele Anwendungen sind Schrittmotoren mit einer feldorientierten Regelung besser geeignet als die konventionell angesteuerten Motoren, z.B. Unsere Closed-Loop Systeme besitzen feldorientierte Regelung, kompensieren also Schrittverluste während der Bewegung und korrigieren Lastwinkelfehler innerhalb eines Vollschritts!.
Feldorientierte Steuerungen effizient entwickeln. Die Motoren sind in zwei Größen erhältlich:. Unsere Closed-Loop Systeme besitzen feldorientierte Regelung, kompensieren also Schrittverluste während der Bewegung und korrigieren Lastwinkelfehler innerhalb eines Vollschritts!.
Durch die feldorientierte Regelung kann der Motor dann bis zu seinem max. Servoantrieb mit elektronischer Getriebefunktion • Betriebsarten:. Die PWM-Endstufen decken einen großen.
Inkremental-Encoder, feldorientierte Regelung Das EtherCAT-Steckmodul EJ7047 ist für den mittleren Leistungsbereich von Schrittmotoren vorgesehen. Unsere Closed-Loop Systeme besitzen feldorientierte Regelung, kompensieren also Schrittverluste während der Bewegung und korrigieren Lastwinkelfehler innerhalb eines Vollschritts!. Feldorientierte Regelung, 48€V€DC, 5€A Die EtherCAT Box EP7047-1032 ist für den mittleren Leistungsbereich von Schrittmotoren vorgesehen.
Der Spezialist rund um das Thema Servomotor, Linearmotor, EC Motor, DC Motor und BLDC Motor bis 4000 Watt Abgabeleistung. Die Ansteuerung von Schrittmotoren besticht mit ihrer Einfachheit, doch geht sie mit Performanceeinbussen einher. Start Automatisierung Antriebstechnik Kernkompetenz feldorientierte Regelung.
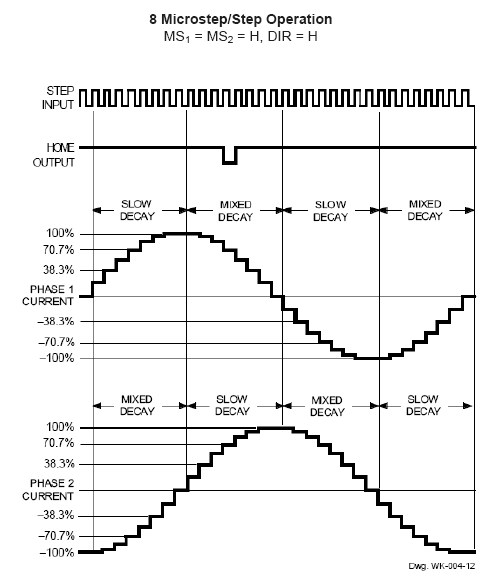
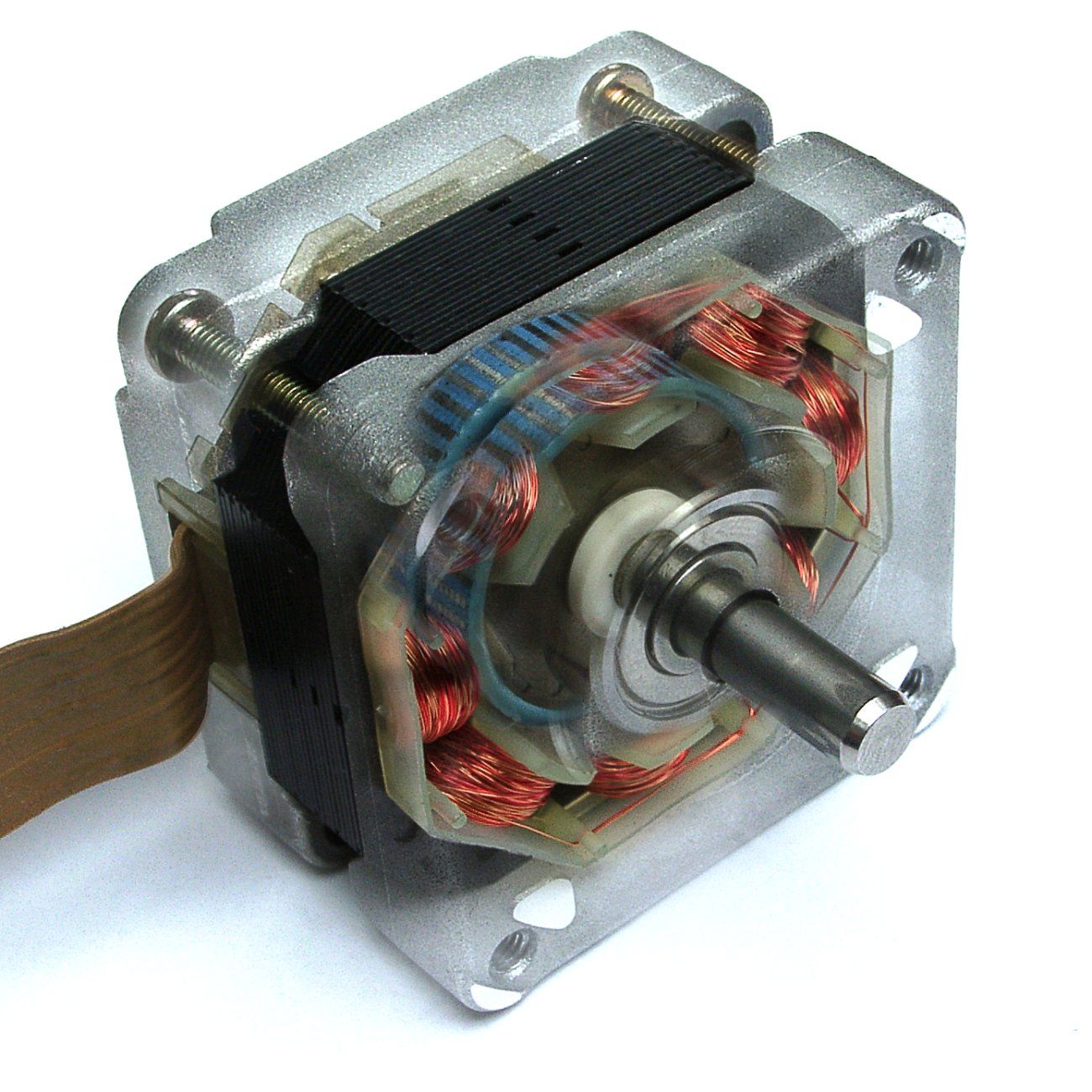
Anders als bei Open-Loop Schrittmotorsystemen, bei denen der Strom konstant ist, variiert der Ausgangsstrom in Closed-Loop Schrittmotorsystemen und wird basierend auf die jeweilige Bewegung und Last optimiert. Der Rotor ist als Permanentmagnet ausgeführt, während der Stator aus einem Spulenpaket besteht. ��Schrittmotormodul 48�V�DC, 5�A, mit Inkremental-Encoder, feldorientierte Regelung Author:.
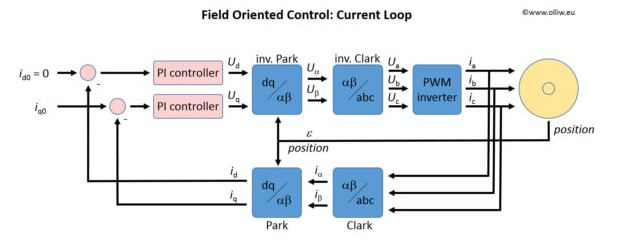
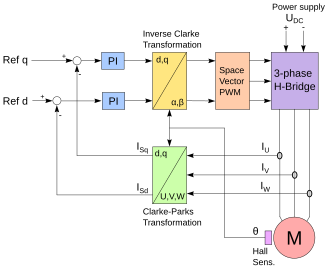
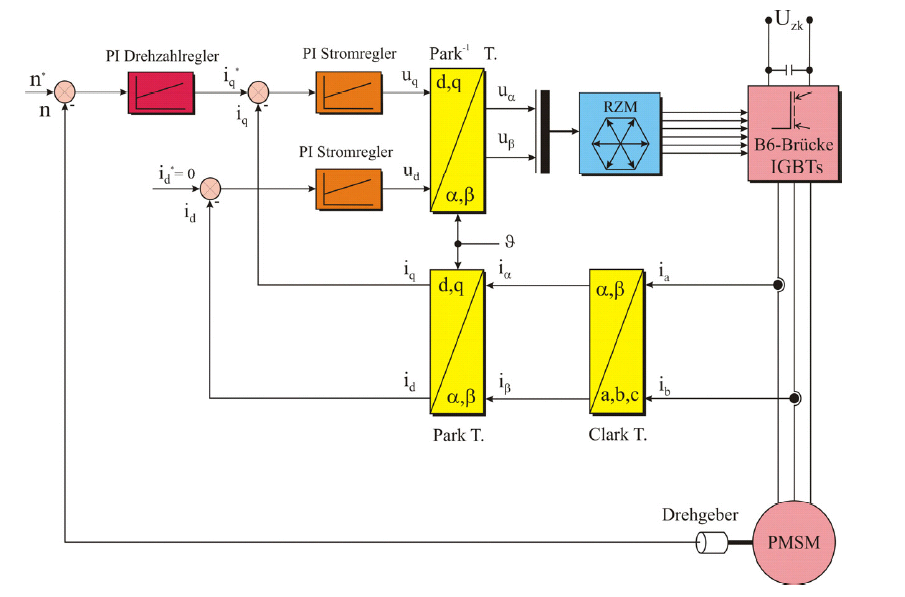
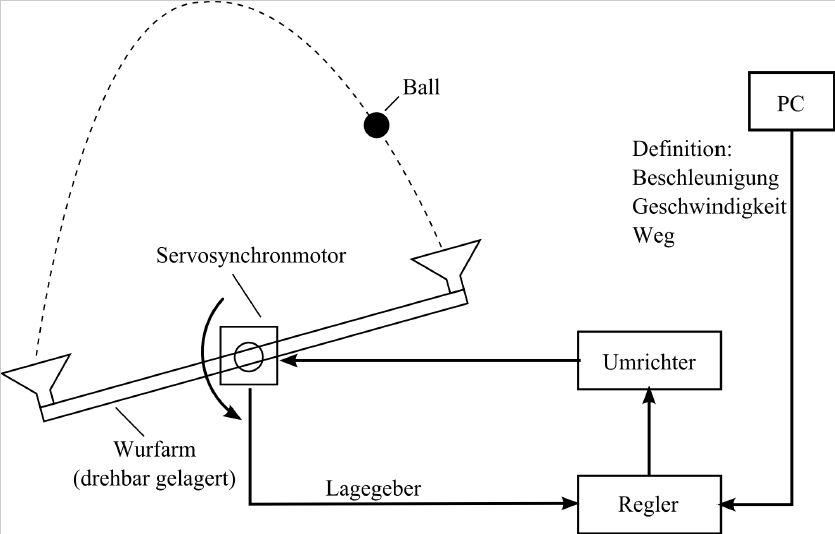
Im Rahmen des Labors wird ein Einblick gegeben, welche regelungstechnischen Vorteile das Verfahren bietet, was Feldorientierung bedeutet und wie eine Maschine feldorientiert beschrieben werden kann. Der wesentliche Unterschied zum „überwachten“ Schrittmotorbetrieb (manchmal von den Herstellern auch als „semi closed loop“ bezeichnet), liegt in der Ansteuerung der Wicklungen. Field oriented control) für Drehstrom- maschinen ist, eine entkoppelte Regelung von Fluss und Drehmoment zu erhalten, um ein resultierendes Verhalten wie bei Gleichstromnebenschlussmaschinen, aufzuweisen.
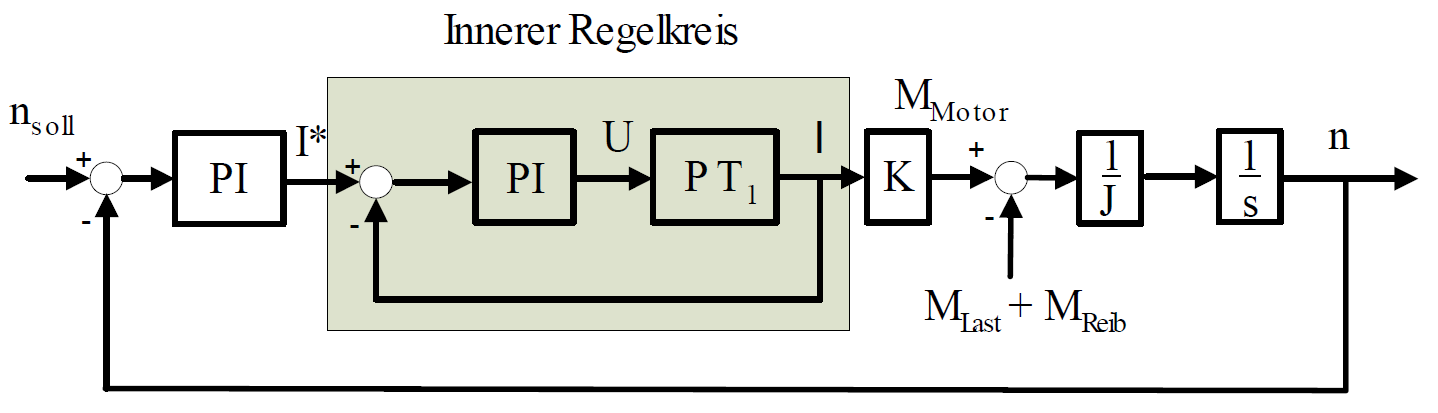
EPE 53-1 Gleichstromantriebe mit kaskadierter Regelung mittels MATLAB - Simulink 1kW;. Die Frequenz des Statordrehfeldes steht immer in einem festen Verhältnis zur Drehzahl des Rotors. Klassisch werden gegen solche Probleme kaskadierte Regelstrukturen eingesetzt.
Die höhere Effizienz, Präzision und Zuverlässigkeit fördern diesen Trend. Durch die feldorientierte Regelung verhält sich der Schrittmotor wie ein DC-Servo - mit einer Nenndrehzahl unter 1000 U/min, aber einem Drehmoment bis zu 3,5 Nm. Alle Plug & Drive Motoren von Nanotec implementieren die feldorientierte Regelung (Closed Loop).
Das könnte Ihnen auch gefalle Closed Loop Schrittmotor-Treiber-Kombination mit Absolutsensor 0,36° mit integriertem Controller (FLEX) AR Serie - Schrittmotor-Treiber-Kombination (DC Betriebsspannung) 7.497 KB Unsere Closed-Loop Systeme besitzen feldorientierte Regelung, kompensieren also Schrittverluste während der Bewegung und korrigieren Lastwinkelfehler innerhalb eines Vollschritts!. Die feldorientierte Regelung für elektrische Motoren bringt verschiedene Vorteile:. Das Ziel der feldorientierten Regelung (FOC.
Folge Deiner Leidenschaft bei eBay!. Feldorientierte Regelung TECHNIK Prozessebene Bei der Kranapplikation ei-nes chinesischen Anbieters wurde eine feldorientierte Regelung mit Luenberger-Beobachter für verschiede-ne Motortypen implemen-tiert. Intelligente Motoren Hauptkern aller Technsoft Kompaktantriebe ist der MotionChip™ - ein intelligenter frei programmierbar Motion-Controller der speziell für komplexe Motion-Control-Aufgaben konzipiert wurde.
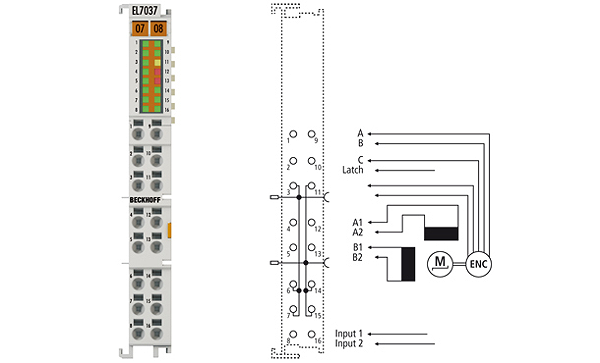
Betriebsmodus feldorientierte Regelung Positionsauflösung 24 Bit/U Abtastrate kHz PWM mit kHz Echtzeit-Datenerfassung 2x Input-Capture (x, v, F) 2x Output-Trigger (x, v, F) 1x Positionsgeber-Eingang Einstellbare Stromabsenkung über Software Schutzfunktion I2t Überwachung Temperaturüberwachung Stromüberwachung Spannungsausfalldetektion. Sie sind, zusammen mit zwei Eingängen für Endlagenschalter, im EtherCAT-Steckmodul untergebracht. Bei digitaler Regelung sind Abtastschritte genau einzuhalten, da die PWM Module üblicher-weise zu Beginn eines neuen PWM-Takts den neuen Sollwert abtasten.
Einführung in die Regelungstechnik – Motorarten (Gleichstrom-, permanenterregter Synchron-, Asynchron-, Schrittmotor) – Polradorientierte Regelung, Zweiachsentransformation, Drehmomentbildung, Kaskadenregelung – Sensoren für Strom, Drehzahl und Position – Antriebsfunktionen (elektronisches Getriebe, Kurvenscheibe, elektrische Welle) – Kommunikation (Feldbus). Feldorientierte Regelung (Closed Loop). Das Magazin für alle Themen der Automatisierungsbranche.
Für Antriebe mit einem hohen Drehmoment bei niedrigen Drehzahlen sind FO-Stepper geeignet. EPE 51-1 Feldorientierte Regelung von Asynchronmotoren mit MATLAB - Simulink 1kW;. Beim Umschalten zwischen den Stufen eines Waschprogramms).
Contribution to magazine or newspaper:. Da der integrierte magnetische Drehgeber auf eine Umdrehung immer einen Absolutwert liefert, ist der geregelte Betrieb sofort nach dem Einschalten aktiv und es muss keine Referenzfahrt durchgeführt werden. Im besten Fall ist die Auflösung des Encoders ein Vielfaches der Vollschrittauflösung des Motors.
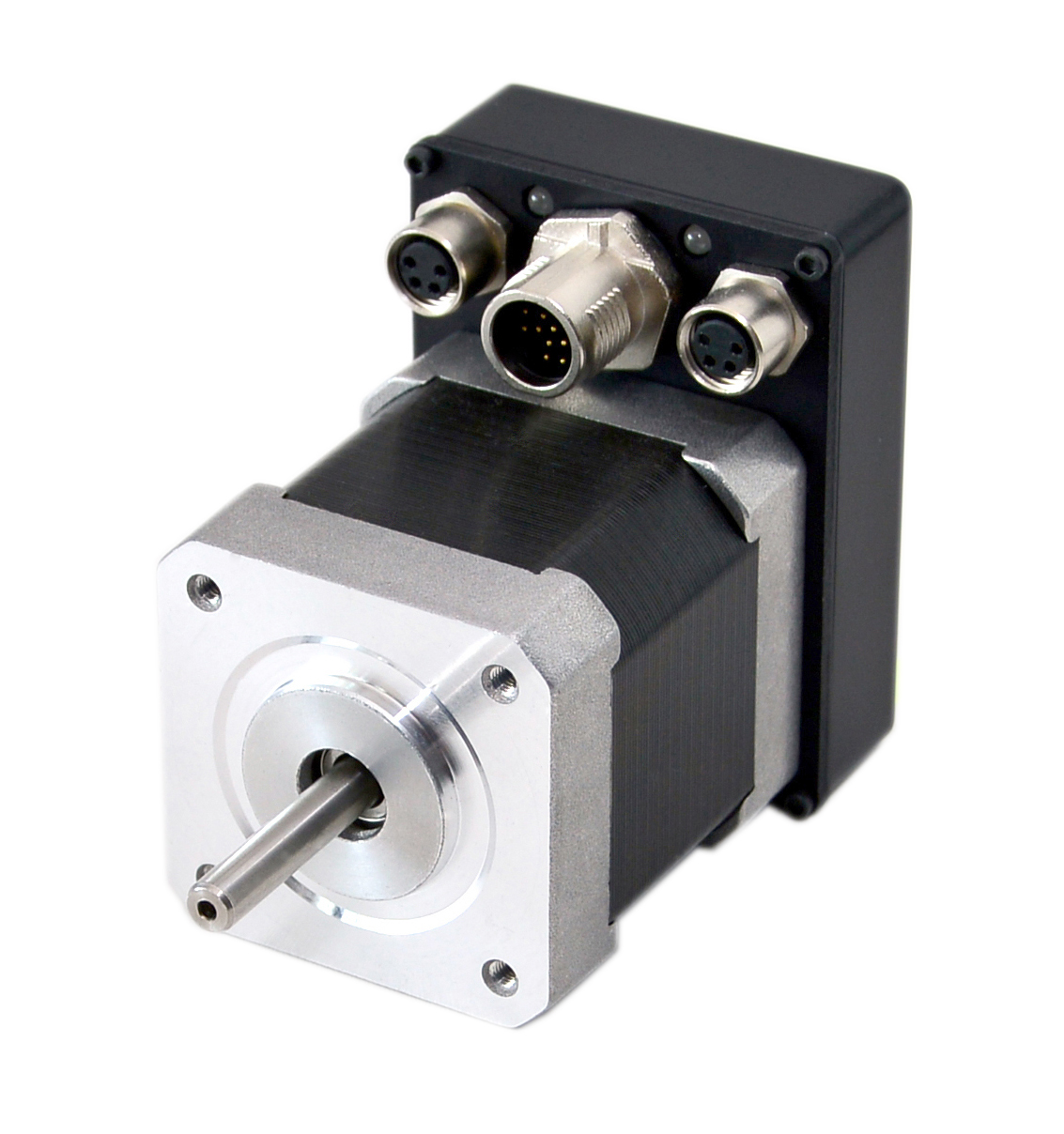
Der Schrittmotor ist ein Elektromotor, vergleichbar dem Synchronmotor. Schrittmotor AS00 ideal für die Closed-Loop-Regelung der EP7047-1032 geeignet. Beckhoff Automation | www.beckhoff.de.
• Schrittmotor mit integriertem frei programmierbarem Servoregler • Hohe Dynamik und Effizienz durch feldorientierte Regelung (FOC) • Betriebsspannung:. Der MotionChip™ bietet die Möglichkeit, den leistungsstarken digitaler Signalprozessor (DSP) von Texas Instruments als unabhängige, intelligente Einheit einzusetzen. Die kostenfreie Nachrichtenapp für die Industrie.
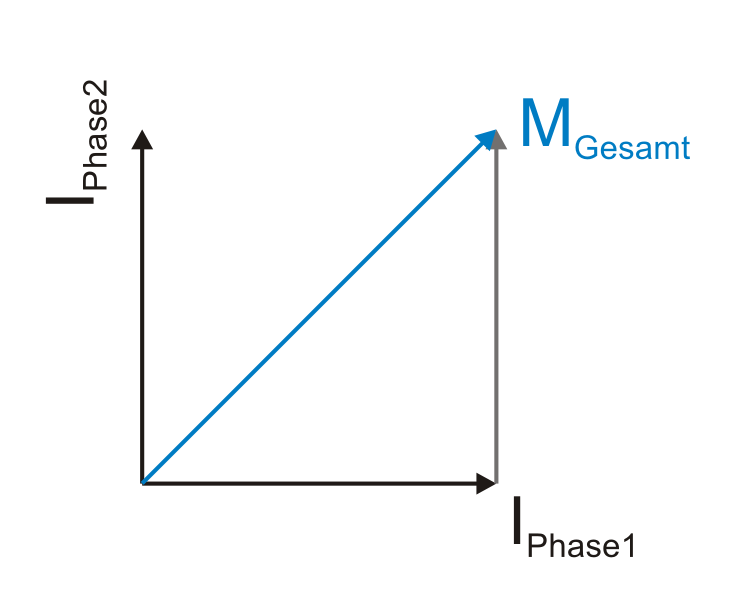
Mit der FOR lassen sich Drehmoment und Fluss unabhängig regeln. Über 80% neue Produkte zum Festpreis;. Die Feldorientierte Regelung von BLDC Motoren mit Raumzeigermodulation (Space Vector Modulation, SVC), die Blockkommutierung (Six-Step Modulation) mit und ohne Sensoren sowie diverse Verfahren zur Ansteuerung von Schrittmotoren.
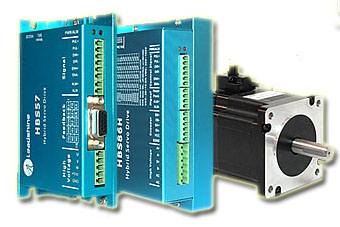
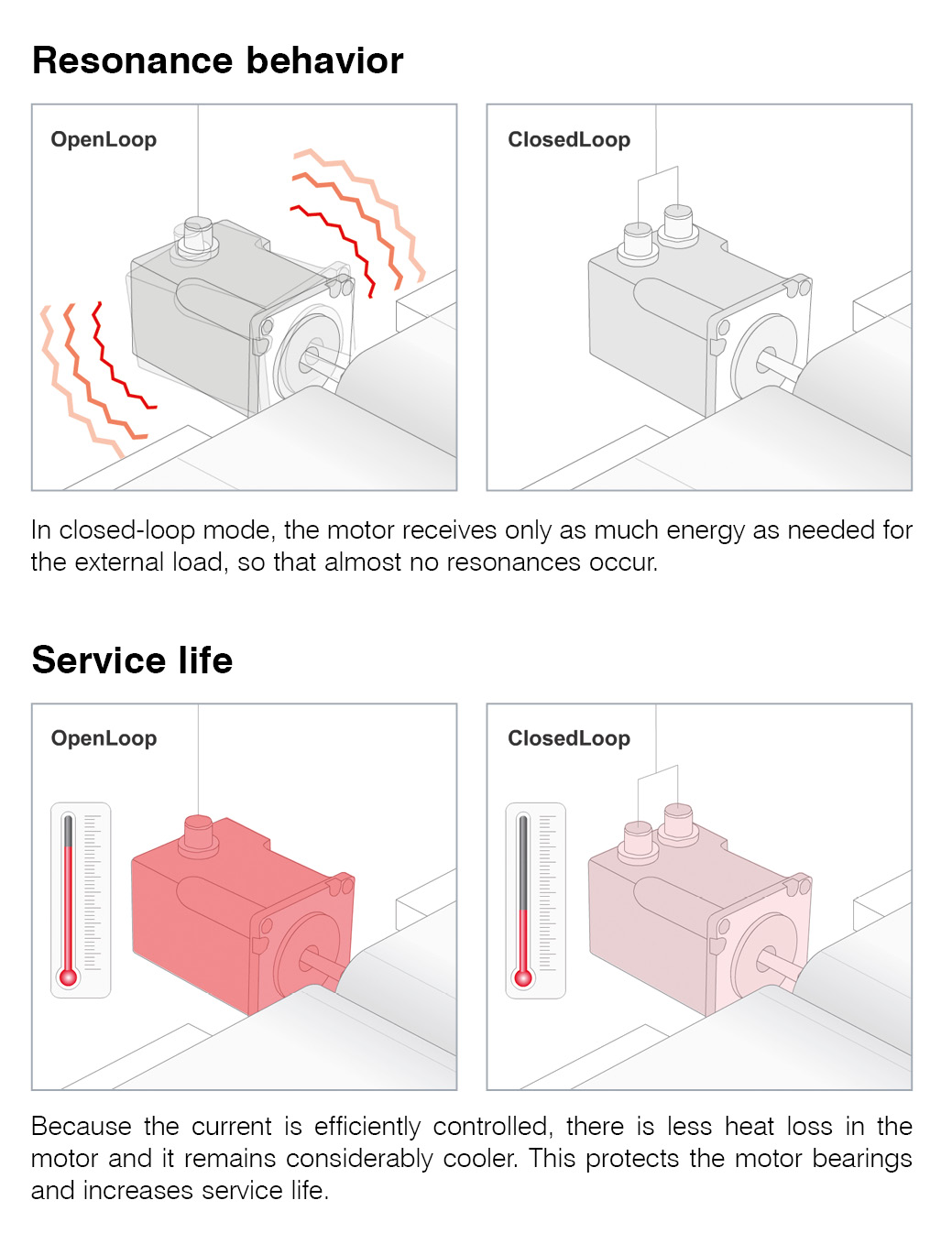
FOC erhöht die Effizienz eines Motors, der nun jederzeit bei optimalem Drehmoment in Betrieb ist. Die feldorientierte Regelung vermindert Resonanzen und reduziert die Wärmeentwicklung und die Geräusche des Motors deutlich, was einen Betrieb mit servoähnlichen Eigenschaften ermöglicht. Alle Motoren der Serie AS00 sind auf die EtherCAT-Schrittmotorklemmen EL7037 (1,5 A) und EL7047 (5 A) abgestimmt.
Vom Asynchronmotor über den bürstenlosen Servoantrieb bis zum Schrittmotor. Fluder, Otto Henke, René Christopher, Henschel. So erhält man ein System, das bei -50% der Nenndrehzahl eines Servomotors gleicher Baugröße das 2- bis 3-fache Drehmoment dauerhaft erreichen.
Feldorientierte Regelung In den Extended Operation Modeswird der Schrittmotor wie ein Servomotor nach dem Prinzip der Feldorientierten Regelung betrieben. Das ist das neue eBay. Geht man noch einen Schritt weiter, kann ein Schrittmotor wie ein Servomotor betrieben werden, d.h.
Geschw.-Regelung Feldorientierte Statorstrom-Regelung Hochauflösendes Positionsinterface RS 485 Schrittmotor-Interface Leitachsgeber-FS03.fh5 MS-DOS - PC® Parameter Diagnosen Betriebsdaten RS 232 Leitachspos. Den PD2-C gibt es als Schrittmotor mit 12 bis 48V Betriebsspannung und einem Nenndrehmoment von 0,5Nm sowie als BLDC-Motor mit einer Nennleistung von 105W und einer Spitzenleistung bis zu 315W. IEE_13_3_064_751_ZUB_sonderdruck.indd 64 21.03.13 09:59:04.
Lageregelung Geschw.-Regelung Feldorientierte Statorstrom- Regelung Hochauflösendes Positionsinterface. EPE 52-1 Geregelte Permanentmagnet Servoantriebe mit MATLAB - Simulink 1kW;. Das Produkt kann vom Artikelbild abweichen.
Der wesentliche Unterschied zum „überwachten“ Schrittmotorbetrieb (manchmal von den Herstellern auch als „semi closed loop“ bezeichnet), liegt in der Ansteuerung der Wicklungen. Beim Schrittmotor bietet die Vektor-orientierte Ansteuerung einen akustisch sehr ruhigen Motorlauf ähnlich wie ein bürstenloser Servomotor bei deutlich geringeren Motorkosten. Daher verhalten sich Schrittmotoren und BLDC-Motoren wie DC-Servos.
Zudem wird meistens eine symmetrische PWM genutzt, die pro Abtastschritt der Regelung eine volle Periode des Dreiecksignals erzeugt. Schrittmotor-Endstufe ES-D 808 / Closed Loop System. Die Rechenleistung des CPU-Kerns ermöglicht den Einsatz komplexer Regelalgorithmen, z.B.
Somit gilt T PWM = T Abt. 56 und 60 mm (NEMA 23 bzw. Orientierte Regelung des Schrittmo-tors über die Encodersignale, die der Regelung eines Servo- oder BLDC-Motors entspricht und aus dem klassischen Schrittmotor einen hochpoligen Servo-motor macht.
Die zur Regelung notwendige Rotorposition bzw. Die feldorientierte Regelung vermindert Resonanzen und reduziert die Wärmeentwicklung und die Geräusche des Motors deutlich, was einen Betrieb mit servoähnlichen Eigenschaften ermöglicht. Die feldorientierte Regelung ist eines der am weitesten verbreiteten Verfahren zur Regelung dreiphasiger Maschinen.
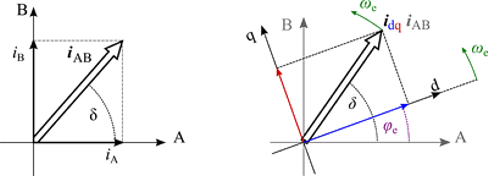
Für DKC +24V Reglerfreigabe RS 232- Startsignal AH/Start Schnittstelle Nullbezug. Alle Motoren der Serie AS00 sind auf die EtherCAT-Schrittmotorklemmen EL7037 (1,5€A) und EL7047 (5€A) abgestimmt. Dabei werden die feldbildende d-Komponente und die drehmomentbildende q-Komponente separat.
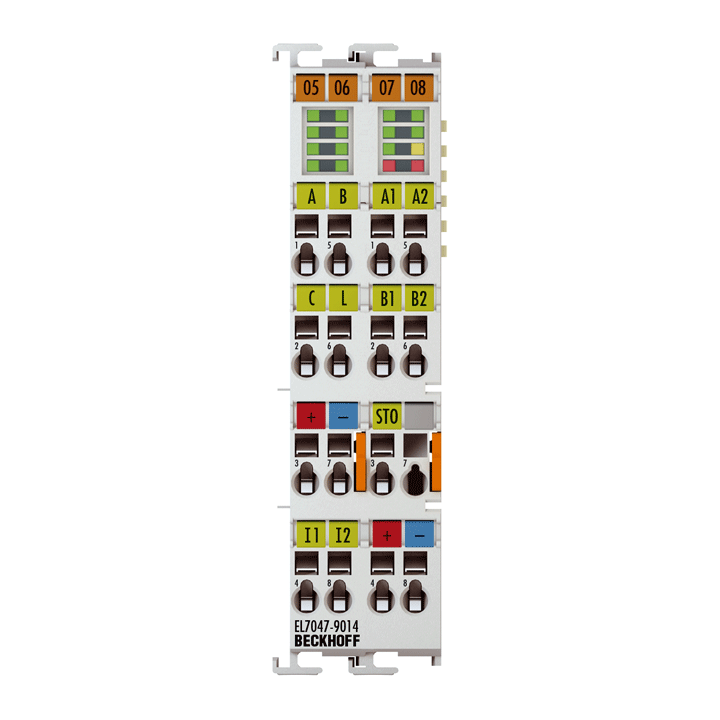
EL7047 | Schrittmotorklemme 48 V DC, 5 A, mit Inkremental-Encoder, feldorientierte Regelung Die EtherCAT-Klemme EL7047 ist für den mittleren Leistungsbereich von Schrittmotoren vorgesehen. Für eine perfekte Regelung benötigen sie hochauflösende Encoder.

Schrittmotor Mit Servo Performance All Electronics

Plug Drive Motoren Mit Integrierter Steuerung Pdf Free Download

Data Sheet Rotary Table Rt2a With Stepper Motor Fohrenbach Gmbh Positionier Systeme Pdf Catalogs Technical Documentation Brochure
Schrittmotor Endstufe Jk Hss57 Closed Loop System 135 00

Closed Loop Technologie Fur Schrittmotoren

Optische Inkremental Encoder Fur Schrittmotoren Mev Elektronik Service Gmbh
Stromregler Archives Schrittmotor Blog Dipl Ing Thorsten Ostermann Schrittmotor Blog Dipl Ing Thorsten Ostermann
Feldorientierte Regelung Stillstandsmoment Mikrocontroller Net
:quality(80)/images.vogel.de/vogelonline/bdb/1436400/1436421/original.jpg)
D2jsaml9jl3hwm

Pd2 Cb Usb Online Handbuch Betriebsarten Nanotec
Digitalcollection Zhaw Ch Bitstream 3 19 Fluder Schrittmotoren Pdf

Elektromotor Dc Motor Schrittmotor Bldc Foc

Schrittmotoren Einmal Anders Aktuelle Technik

Sensorlose Steuerung Von Schrittmotoren Youtube
Trinamic Bringt Eine Fur Schrittmotoren Optimierte Serie Optischer Encoder Heraus Mev Elektronik Service Gmbh Pressemitteilung Pressebox
De Nanotec Com Fileadmin Files Application Notes Sensorlose Regelung Sensorlose Regelung Pdf
Feldorientierte Regelung Stillstandsmoment Mikrocontroller Net

Servo Schrittmotoren Dynamisch Antreiben Via Canopen Feldebene Antriebe Computer Automation

Servo Schrittmotoren Dynamisch Antreiben Via Canopen Feldebene Antriebe Computer Automation
Silo Tips Download Berblick Kompakte Antriebstechnik
D Nb Info 34

Stromregler Archives Schrittmotor Blog Dipl Ing Thorsten Ostermann Schrittmotor Blog Dipl Ing Thorsten Ostermann

Schrittmotoren Einmal Anders Aktuelle Technik

Elektrische Antriebssysteme Institut Fur Antriebssysteme Und Leistungselektronik Leibniz Universitat Hannover
Vektorregelung Wikipedia

Intelligente Kompaktantriebe Technosoft Motion Control
How Does A Stepper Motor Work Stepper Motor History Arrow Com Arrow De
Silo Tips Download Berblick Kompakte Antriebstechnik

El7047 Manualzz
Hybrid Servos Closed Loop Systeme Nts Electronic And Components Gmbh
2
Beckhoff El7037 Kaufen Partbeaver Industrielle Automatisierung

Closed Loop Technologie Nanotec

El70x7de Manualzz
Schrittmotor Steuerung Archives Schrittmotor Blog Dipl Ing Thorsten Ostermann Schrittmotor Blog Dipl Ing Thorsten Ostermann

News Detailseite A Drive Technology
:quality(90)/images.vogel.de/vogelonline/bdb/1438400/1438437/original.jpg)
Schrittmotoren Funf Tipps Zu Stepper Antrieben

Schrittmotor Endstufe Es Dh2306 Closed Loop System 324 50
El7047 9014 Schrittmotorklemme 48 V Dc 5 A Mit Inkremental Encoder Feldorientierter Regelung Sto Beckhoff Osterreich
Beckhoff Information System German

Presse Dunkermotoren Gmbh
Elektrische Antriebssysteme Institut Fur Antriebssysteme Und Leistungselektronik Leibniz Universitat Hannover

Kernkompetenz Feldorientierte Regelung All Electronics
Stromregler Archives Schrittmotor Blog Dipl Ing Thorsten Ostermann Schrittmotor Blog Dipl Ing Thorsten Ostermann

Feldorientierte Antriebssteuerung Sensor Regelt Motor Automation Elektroniknet

Epb1 Verfahren Zur Geberlosen Feldorientierten Regelung Einer Asynchronmaschine Google Patents
Digitalcollection Zhaw Ch Bitstream 3 19 Fluder Schrittmotoren Pdf

Feldorientierte Regelung Pdf Kostenfreier Download

Schrittmotor Mit Servo Performance All Electronics
Motorstrom Archives Schrittmotor Blog Dipl Ing Thorsten Ostermann Schrittmotor Blog Dipl Ing Thorsten Ostermann

Ein Stepper Mit Servoqualitaten

Kernkompetenz Feldorientierte Regelung All Electronics
Intelligente Kompaktantriebe Technosoft Motion Control

Feldorientierte Antriebssteuerung Sensor Regelt Motor Automation Elektroniknet

Frequenzumrichter Wikipedia

Closed Loop Technologie Nanotec

Closed Loop Technologie Nanotec

Presse Dunkermotoren Gmbh

Feldorientierte Regelung Kleiner Gleichstrommotoren Verhilft Drohnen Zum Aufstieg Digikey
Http Www Zub Li Press Pdf Iee 13 03 Foc Sonderdruck Lowres Pdf

Schrittmotoren Einmal Anders Aktuelle Technik

Schrittmotoren Einmal Anders Aktuelle Technik
Digitalcollection Zhaw Ch Bitstream 3 19 Fluder Schrittmotoren Pdf
Http Www Zub Li Press Pdf Iee 13 03 Foc Sonderdruck Lowres Pdf

Prazise Praxis

Rocketronics De 3 Phasen Closed Loop Schrittmotor Es Mh3421 Mit Encoder 12 0nm
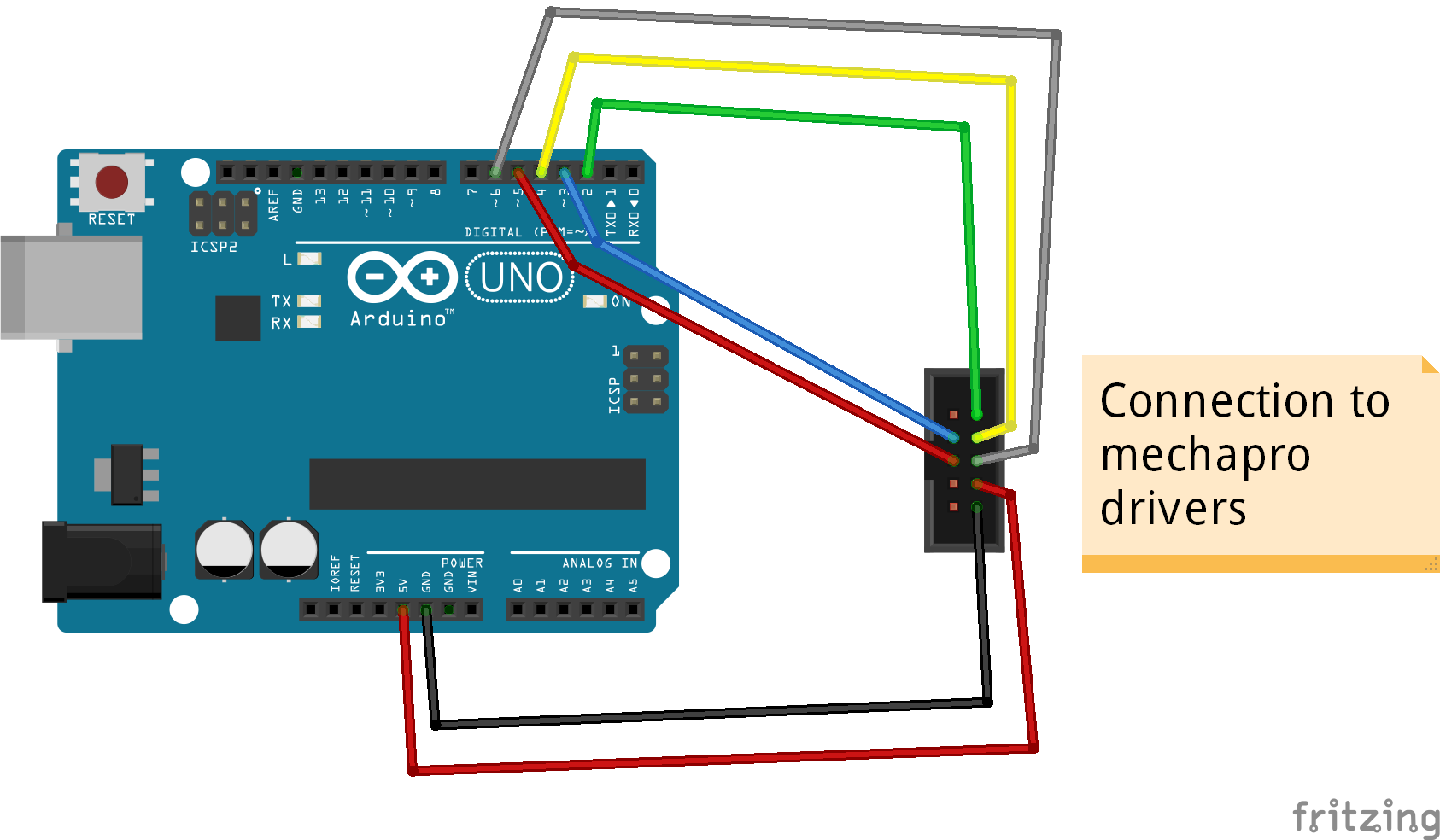
Cnc Steuerung Uber Arduino Mega Motorauswahl Encoder
Feldorientierte Regelung Mit Fpga Nios Ii Mikrocontroller Net

Schrittmotor Endstufe Es D 808 Closed Loop System 159 50

Schrittmotoren Einmal Anders Zhaw Digitalcollection

Sensorlose Steuerung Von Schrittmotoren Youtube
Henschel Robotics Ch Wp Content Uploads 17 08 Anleitung Hdrive 1 2 Pdf
2
Elektrische Antriebssysteme Institut Fur Antriebssysteme Und Leistungselektronik Leibniz Universitat Hannover

Sps Magazin Dc Servo Motoren Mit Feldorientierter Regelung

Feldorientierte Regelung Der Permanenterregten Synchronmaschine Ohne Lagegeber Fur Den Gesamten Drehzahlbereich Bis Zum Stillstand Pdf Kostenfreier Download
Motorstrom Archives Schrittmotor Blog Dipl Ing Thorsten Ostermann Schrittmotor Blog Dipl Ing Thorsten Ostermann
Http Www Zub Li Press Pdf Iee 13 03 Foc Sonderdruck Lowres Pdf
Permanentmagnet Synchronmotor Infineon Technologies

Lucas Nulle Kurs Elektrische Maschinen 5 Schrittmotor
Elektrische Antriebssysteme Institut Fur Antriebssysteme Und Leistungselektronik Leibniz Universitat Hannover

Meldungen Getaggt Mit Schrittmotor Elektor Elektor Magazine

Elektromotor Dc Motor Schrittmotor Bldc Foc

As41 Schrittmotor 3 3 Nm M0 N3 Nema34 86 Mm Beckhoff Schweiz Deutsch

Trinamic Bringt Eine Fur Schrittmotoren Optimierte Serie Optischer Encoder Heraus Mev Elektronik Service Gmbh Pressemitteilung Pressebox
Silo Tips Download Berblick Kompakte Antriebstechnik
Schrittmotoren Breite Auswahl Direkt Vom Hersteller Nanotec

Dynamischer Antrieb Mit Servomotor Springerlink

Feldorientierte Regelung Kleiner Gleichstrommotoren Verhilft Drohnen Zum Aufstieg Digikey
Hsr Ch Uploads Tx Icscrm Ba E 11 Tmeister Pdf
Elektrische Antriebssysteme Institut Fur Antriebssysteme Und Leistungselektronik Leibniz Universitat Hannover
2

Pd2 Cb Usb Online Handbuch Betriebsarten Nanotec
Ftp 52 28 55 137 Document Catalog Main Catalog German Einzelseiten Ethercat El7031 0030 Pdf



